
 Global mining technology company MineWare continues to lead the way in dragline mining innovation, recently completing stage one of its ACARP project in collaboration with CRCMining and the University of Queensland.
Global mining technology company MineWare continues to lead the way in dragline mining innovation, recently completing stage one of its ACARP project in collaboration with CRCMining and the University of Queensland.
Funded by an ACARP grant of more than $600,000—as well as in-kind support from MineWare and CRCMining—the joint R&D project aims to develop futuristic dig sequencing technology.
MineWare CEO and project co-leader Andrew Jessett said that this stage of the project has focused on the design of the dragline excavation sequencing system, underpinned by a sophisticated algorithmic approach combining real-time DTM scanner technology, 3D mine plan profiles and operator feedback.
“Leveraging MineWare digital terrain mapping capability, the dragline excavation sequencing system will act as an on-board supervisor that can continually monitor the state of the excavation and guide operators to compute the optimal dig sequence,” he said.
“Using two boom-point lasers, the dragline swings as part of its typical operation across the terrain to create a 3D map of the pit, providing an effective formula for future sequences including where to position, where to dig and where to dump.”
The prototype’s algorithmic approach effectively creates a strategy for excavating material along the strip to reduce cycle times, improve utilisation of spoil and the rate of lineal advance, as well as maximise productivity.
In stage two of the project, the team will trial the algorithm on a fully operational production dragline, integrated into MineWare’s Pegasys Dragline Monitoring system. “During this stage, operator visualisation and supervisor report tools will be developed to analyse operator-based sequencing of excavation against the sequencing algorithm,” Jessett continued. “From there we can then move towards developing algorithms that sequence dragline excavation operations applicable to low-wall extended-key/chop with in-pit bench operations, under a range of circumstances, with a future application in dragline automation.”
Figures
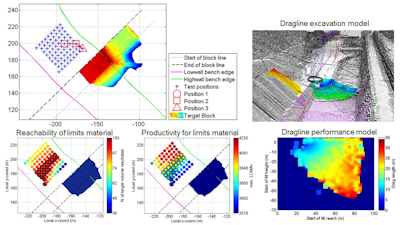
FIGURE 1. COMPUTING DRAGLINE EXCAVATION SEQUENCES – THE SEQUENCING ALGORITHM COMPUTES THE WALK-UP SEQUENCE TO EXCAVATE A BLOCK BY USING MODELS OF DRAGLINE GEOMETRY, PERFORMANCE AND TERRAIN INTERACTION TO:
(i) IDENTIFY THE MATERIAL THAT CAN BE REACHED FROM DIFFERENT POSITIONS
(ii) DETERMINE HOW THAT MATERIAL WILL FIT IN THE AVAILABLE SPOIL ROOM
(iii) ESTIMATE THE PRODUCTIVITY OF EXCAVATING THAT MATERIAL TO SPOIL.
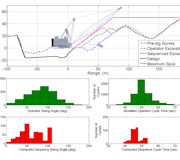
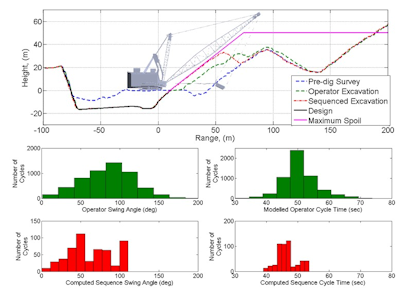
FIGURE 2. COMPARISON WITH OPERATOR EXCAVATION – SIMULATION OF THE COMPUTED SEQUENCE SHOWS MORE EFFECTIVE USE OF AVAILABLE SPOIL ROOM AND A REDUCTION IN THE AVERAGE SWING ANGLE AND CYCLE TIME REQUIRED TO COMPLETE THE EXCAVATION, AS COMPARED TO HOW THE OPERATORS EXCAVATED THE STRIP. NOTE THAT CYCLE TIME OF BOTH THE COMPUTED-SEQUENCE AND OPERATOR-DRIVEN EXCAVATIONS ARE NORMALIZED THROUGH THE DRAGLINE PERFORMANCE MODEL TO PROVIDE AN EQUITABLE COMPARISON.
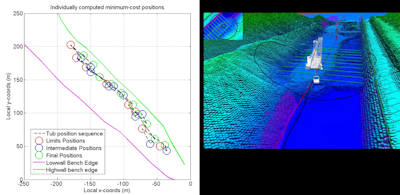
FIGURE 3. SIMULATION OF SEQUENCED EXCAVATION, SHOWING VISUALIZATION OF DTM DATA AND THE DRAGLINE’S INTERACTION WITH THAT TERRAIN TO EXCAVATE THE COMPUTED SEQUENCE TO SPOIL IN COMPLIANCE WITH THE STRIP DESIGN.
Backgrounder
Dragline development through history
• The last 20 years have seen a number of initiatives to improve the performance of draglines. Some of the most significant initiatives to date include the development of:
• CRCMining’s Universal Dig and Dump technology (UDD)
• Swing automation technology by CSIRO in the 1990s
• Duty monitoring by CRCMining leading to the emergence of dragline duty meters in the 2000s
• Bulk density monitoring technology by CRCMining in the last five years
• Digital terrain mapping technology by CSIRO, MineWare and LC Engineering.
• Advances in shovel automation by CRCMining’s Shovel Load Assist Program (SLAP) are related to this work, demonstrating that mining shovels can automatically load haul trucks.
The role of operator assist technologies in excavation planning
• The best dragline operators are well skilled in the area of excavation planning, performing high-level functions that generate solutions to the following questions: When should the dragline be repositioned? What is the optimal sequence of moves to excavate this block? How should the dragline move to get there? Though most moves are small, correct decision making can critically influence dragline performance.
• Effective dragline positioning requires a skillful operator who is able to take stock of mine conditions to keep the dragline well placed for easy digging. A skillful operator plans their work so that excavation proceeds in a sensible way and minimizes the number of moves made so that the time available for digging is maximised.
• This project aims to provide an operator support that will assist operators in decisions related to the sequencing of excavation, contributing to a broader roadmap towards improving dragline performance through automation.
Project snapshot
• The project aims to develop an operator assist technology that provides real-time guidance to an operator on how to best excavate a dragline block.
• The technology will combine an algorithm to compute the optimal dig sequence and associated operator/supervisor data presentation tools.
• The work required to realise this objective includes the development of an optimisation and sequencing algorithm that can combine real-time DTM scanner technology, 3D mine plan profiles and operator feedback.
• The algorithm will be able to generate step-by-step guidance to the dragline operator on where to position the machine, where to dig, and where to dump. It will also allow reconciliation of planned and actual digging as a by-product of the measurement and monitoring required for dig sequencing.
• The project uses the MineWare Pegasys Dragline Monitor to deliver a prototype technology package.
Project leadership
The project is jointly led by MineWare CEO Andrew Jessett and Professor of Mechanical Engineering at the University of Queensland Ross McAree:
• MineWare founder and CEO Andrew Jessett has been actively involved in the advancement of Australia’s dragline and shovel monitoring systems over the last decade including the pioneering Universal Dig and Dump (UDD) dragline technology. Andrew founded MineWare after creating and commercialising the world’s most advanced dragline monitoring system, Pegasys.
• Ross McAree is Professor of Mechanical Engineering at the University of Queensland, Head of the Mechatronic Engineering program, and Director of Research for the School of Mechanical Engineering and Mining Engineering. With research interests focusing around the automation of mining equipment, Ross has led several ACARP projects.
Core research team
• Mathew Green, Product Engineer, MineWare
• Kevin Austin, Senior Research Engineer, CRCMining/The University of Queensland
• Zane Smith, Software Engineer, The University of Queensland







